Figure 01
By author:
| 1 minute read
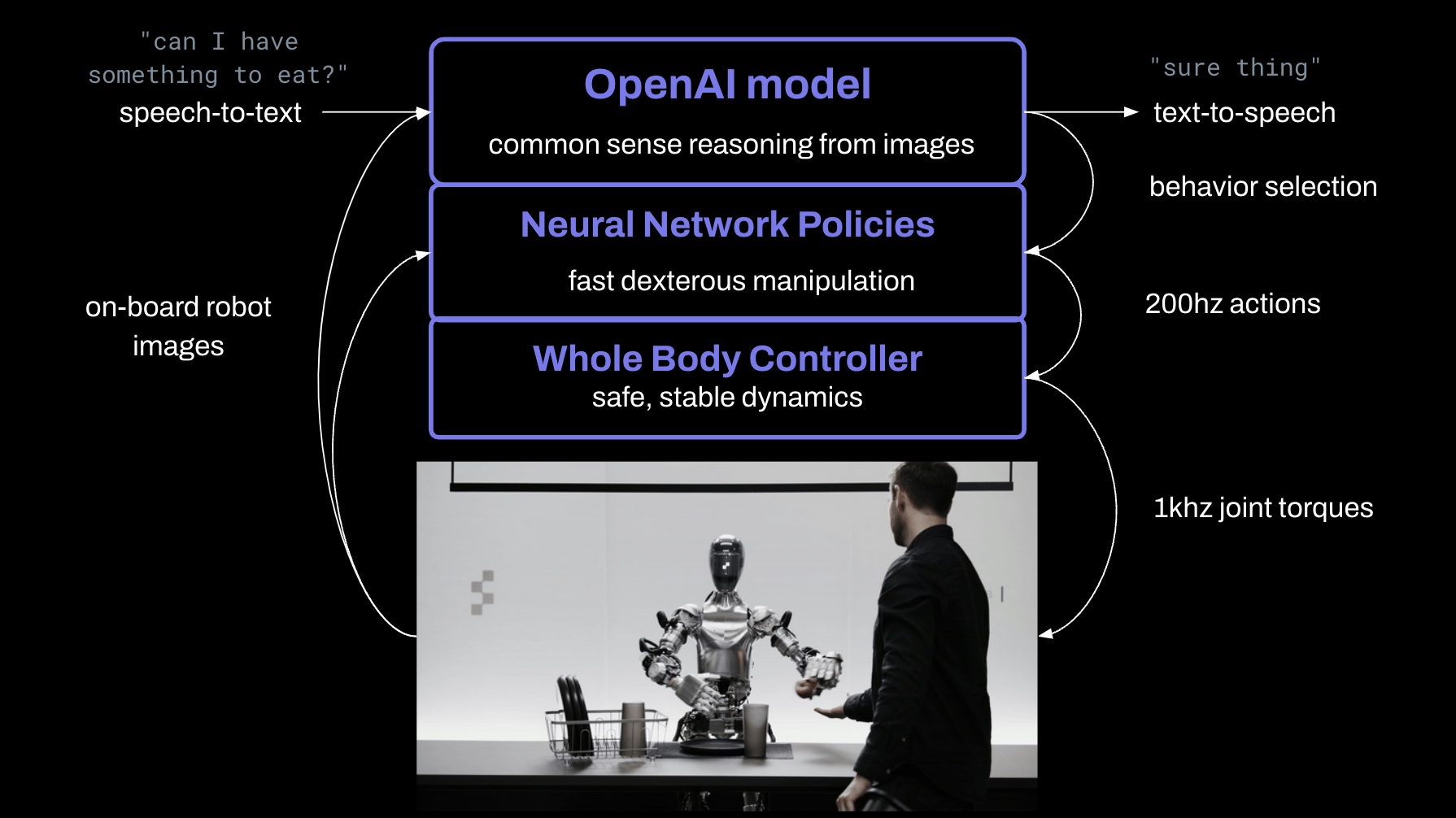
这个架构有点"Think Fast and slow"意味,最上层的多模态模型,处理与外界交互, 生成任务,然后通过一个policy,把任务拆解成为子任务, 然后这些子任务再确保精确的执行。 每一个层级的频率是不一样的,上层执行的慢,需要算力大。越往下层,执行的任务越简单,也需要越即时的反馈。 按这种执行频率递减的方式是经济的,有些事情下层的模块就能够完成,没有必要调用上层模块的资源。比如保持机器人身体的平衡,这个在任何任务下都是需要确保的,跟上层任务无关。 另一方面,为了配合上层模块的执行,下层模块的执行频率就必须更高,从而确保任务正确的完成。
| 模型 | 输入 | 输出 | Hz |
|---|---|---|---|
| OpenAI Model | text,image | text/command | 10 |
| Neural network policy | image | 24 DOF actions | 200 |
| Whole body control | 24 DOF actions,… | joint torques | 1000 |